![[Edit-us]](https://www.editus.jp/wp-content/uploads/2021/01/c04ff33146ebacd91127e25459d47089-1.png)
深海ロボット、ふたたび南極へ|ウイルスと南極編(第4回)|後藤慎平
深海ロボット、ふたたび南極へ
……ウイルスと南極編 ……
後藤慎平

南極湖沼調査で活躍したROV(水中探査ロボット)、AR-ROV01。愛称はKISHIWADA
⚫コロナ禍の観測研究
今回の私の任務は、ペンギン観測(兼食糧運搬係、兼きざはし料理人)である。とはいえ、ペンギン観測なんてやったこともないし専門外だし、なによりペンギンが苦手だからと1度は依頼を断った。一方で、こんな状況もあった。私にペンギン観測隊の打診が来たのはコロナ禍の真っ最中で、さまざまな活動が制限されていた時期だった。街からは人が消えて活気が失われ、コンビニに行くのすらはばかられた時期で、どことなく世の中に元気がなかった。そして、コロナの影響は研究分野にも大きな影を落としていた。海外への渡航が制限されて人の往来ができなくなり、さらに客船で発生したコロナがセンセーショナルに取り上げられたこともあり、多くの研究活動がのきなみ中止や規模縮小を余儀なくされた。
じつは私も、その洗礼を受けたひとりだった。1年ほどまえから予定していた研究航海がキャンセルになり、準備した研究を進められない事態が発生していた。研究者にとって1年の遅れはけっこうな痛手なのだが、なかでも大きな痛手を受けたのが、現場観測のデータを扱う研究分野の人たちだった。
たとえば、海洋観測データから気候変動や海洋変動を読み解く研究をしている人たちは、観測機器を回収に行かなければ研究を進めることができない。機器が設置されているのが太平洋のど真ん中の深海などだった場合、どうしても調査船でその場に行って、機器を回収する必要がある。もちろん、1か月~2か月遅れたくらいで内部のバッテリーが空になることはないように設計されているが、出口の見えないコロナ禍においては、「いつ」回収に行けるかがまったく見通せない状況だった。もし、機器が回収できなければ、研究はストップしてしまう。長年かけて取得したデータに「欠測」が出てしまうと、データの信憑性にも影響が出かねない。それに、信憑性の得られないデータでは学術論文が書けず、研究者の業績や将来設計にも影を落とすことになる。たった1秒のデータでも、神経をすり減らせて観測をするのが研究者の世界なのである。われわれ工学者は、そんな「1秒」を記録する装置を作っているのだ。観測空白なんて、あってはならない。

⚫リモート観測の可能性を探る
新型コロナウイルスの感染拡大にともなう活動の制限は、日本の南極観測隊にも影響をおよぼすことになった。2020年11月出発の第62次隊では、過去に類を見ないのではないかと思うほど大変な計画変更を強いられることになったのだという(私は2023年出発の第65次隊である)。
通常、南極観測隊(前回の冒頭でお伝えした先遣隊を除く)は、「しらせ」が先に日本を出港し、11月下旬にオーストラリアで観測隊員を乗せて南極へと向かう。しかし、この年は多くの国が海外からの渡航を制限していたため、「しらせ」は日本と南極を無寄港で往復することとなり、観測隊員も横須賀から乗船していくことになった。さらに、おもな任務を越冬隊員との交代と基地機能の維持に限定し、観測も最小限に絞ることとなった。そのため、例年であれば80名ほどの観測隊員が「しらせ」に乗り込むが、2020年は約半分の40名ていどまで絞り込まれることとなった。
つまり、予定していた観測がゴッソリ抜け落ちてしまったのだ。もちろん、限られた人員で最大限の観測をする計画で進められたが、天候やヘリオペの都合でどうしてもあきらめざるをえない観測も出てくる。研究者が寝食を惜しんで何年もかけて準備をしてきた研究ばかりで、優先順位なんて付けられるものではない。きっと当時の観測隊長は相当な心労だったのではないかと思う。
こんなときこそ、工学の力でできることがあるんじゃないだろうか?
コロナ禍でわれわれの生活においてもロボットが身近な存在となったのは間違いなく、居酒屋やファミレスで配膳ロボットが当たりまえのように動きまわったり、駅や店の案内所でAIコンシェルジュが対応したりする世界をどれくらいの人が想像しただろうか?
そう考えたとき、ロボット工学者でフィールド研究者の自分にできることは、現地に行かない観測技術を発展させることではないか、と考えるようになっていた。
今後また、世界中がコロナのような難題をつきつけられ、ふたたび物理的な人の往来が困難になっても、研究室から、家から、カフェから、フィールドのようすをリアルタイムにうかがい知ることができるシステムがあれば、研究を止めずにすむのではないか?
コロナ禍が始まった当初、そんなふうに考えたことがあり、じつはコツコツと進めていた研究があった。それは人のアクセスが困難な島しょ地域の海底に観測機器を設置し、人工衛星を介して機器にリモート接続することで、リアルタイムに観測データを取得するというシステムであった。しかし、東京オリンピックの延期が早々に決定し、緊急事態宣言がくり返し発出されるなどコロナの出口が一向に見えないことから、大学の水槽を使った遠隔実験までが成功した段階で、研究をストップせざるをえなかった。
そうしたことが背景となり、今回のペンギン観測の依頼を引き受けることになった。島しょ地域のリモート観測のリベンジというわけではないが、過酷な訓練を経て南極へ行き、寒い思いをしながらペンギンのフンにまみれて観測をするなんてことが、ロボットを使うことで少しでも軽減されるのではないかと考えたのだ。
⚫ROVを使ったペンギン観測の意義

ところが⋯⋯。いくら前回の南極観測で湖や海にROV(水中ロボット)を潜らせた経験があるといっても、ペンギンの泳ぐ海がどうなっているのかなんて、1回や2回見たくらいでわかるはずもなく、当たりまえだが「リモート観測を実現するためにどんな課題があるのか?」なんて目線では見ていなかった。おまけに、前述のとおり(第2回参照)南極の気候は年によって大きく異なり、海氷が早く解ける年もあれば、今回のようにまったくといっていいほど解けない年もある。そのため、仮に日本からリモート操作が可能なROVを南極の海に設置したとしても、おそらく、つぎにアクセスしたときには「接続先が見つかりません」という表示とともに、ROVが南極の海の藻屑となったことを知ることになるだろう。
そんなわけで私の任務は、ペンギンが棲息する海の中をROVで観測することはもちろんのこと、将来、自宅のこたつで餅でも食べながら南極のペンギンを見られるようなリモート観測機器を配備するための課題を洗いだすことも目的だった。それは、現時点では夢のまた夢の話で、ROVパイロット経験者が南極の現地に行って操作しても難しいのに、14,000km離れた場所から遠隔で操作するなんて、どんなトラブルが起こってどんな対処をすればいいのか、想像もつかない。しかし、前述の配膳ロボットやAIコンシェルジュしかり、「必要は発明の母」と言われるように、今後、きっとこの技術が南極だけじゃなく、さまざまな極地観測において有効になるのではないかと考えていた。そして⋯⋯それは思わぬカタチで確信に変わった。
●南極で鳥インフルが発生!
2023年12月末に南極に到着し、いよいよ「しらせ」から野外に出ようかというタイミングで、関係者が船内の一室に集められた。そして、その場で「南極大陸での鳥インフルエンザ蔓延の可能性がある」ことが告げられた。
じつはこの情報は、ペンギンや生物の観測をするチームには出国前からチラチラ耳に入ってはいたのだが、「どうやら亜南極で鳥インフルエンザらしきウイルスが確認されたらしい」という情報で、近いうちに南極大陸にも入ってくるのではないか、というレベルの話に留まっていた。しかし、コロナと同様に、いつ爆発的に蔓延するかはわからない。南極には数千kmを飛びまわる鳥も棲息しているため、すでに昭和基地周辺にも感染が拡大しているかもしれない。
そこで、生態系観測の関係者を中心に「新鮮な死骸を見つけたら絶対に近づかないこと」という方針が告げられた。とくにペンギンチームは要注意である。南極条約では、ペンギンとは5メートル以上のソーシャルディスタンスを取らないといけないと決められているが、ペンギンの各個体の重さを計ったりするわれわれは、5メートルどころかゼロ距離で超濃厚接触をすることになる(ペンギン観測に携わる隊員には環境大臣からの許可証が発行される)。おまけにあちこちからフンが飛んでくるため、仮に鳥インフルエンザに感染した個体がいた場合、フンが服や靴に付着した状態で「しらせ」や昭和基地に移動することで、他の地域にウイルスを持ち込むことになる。
そのため、各国の基地でも今年はペンギン観測を中止するかどうかの判断をおこなっているという情報もあり、出国前にはペンギンチームに防護服が配られ、もし大量死などが確認された場合には即座に観測を中止して、衣服やギア(装備品)などもその場で密閉・廃棄することとなっていた。
観測中止──新型コロナウイルスで思い知った厳しい現実が、つぎは鳥インフルエンザというかたちでふたたび問題としてつきつけられた。また世界中で多くの研究が停滞してしまうのか? そう考えたとき、やはりコロナ禍を機にコツコツと取り組んでいたリモート観測の技術開発は間違っていなかったのだと確信するに至った。
ペンギン観測では各個体の計測だけでなく、ルッカリーの数や親鳥の棲息状況、ヒナの孵化状況などをモニタリングすることも重要で、多いときは数日おきにこうした観測業務をおこなっている。しかし、こうした観測こそロボットや工学が得意とする内容で、カメラやAIで状態をモニタリングすることも可能である。そして、いますぐには無理でも、将来的には水中もリモート観測できるようになれば、従来は観測が困難だった季節や突発的な事象が起こったさいにもデータを取得することが可能になる。奇しくも、今回の南極観測において「ウイルス」という共通の敵が明確になった。

⚫新型ROVで、いざ、ペンギンの海へ
今回の観測では、水中ロボット(ROV)を使ってペンギンを追いかけることはあきらめていた。水中でのトップスピードが20ノットを超える生物についていくなど、操縦しているほうも危なっかしい。
じゃあ、ROVで何をするのか? というと、そもそもペンギンのルッカリーがある地域は海に近いことが多いが、じつはこれまで海の中がどうなっているのかは、あまり調べられていなかった。しかし、ペンギンは餌を求めて海へと潜っていく。これまでの研究で彼らがオキアミや魚を食べていることはわかっていたが、海の中のようすを詳しく調べたことはほとんどなかった。その理由としては、これまではROVというツールがあまり知られていなかったことや海氷の下にダイバーが潜るのは危険なことから、広範囲を面的に調べることができなかった。
そこで今回、とにかく広い範囲の海面から海底までを見てみようということになった。これにより、ペンギンがどのように海に潜り、餌を採り、巣に戻るのかが見えてくるかもしれないと考え、水深100mまで潜れるロボットを新たに開発した。といっても、今回も研究費が潤沢にあるわけではないので、おもに市販品を活用して組み上げることにした。幸いにも7年前に南極湖沼用ROVを開発したときに比べ、水中ロボット市場が急激に成長し、市販品も多く生みだされていた。そのおかげで今回はソーナーやマニピュレータまで装備したぜいたく仕様のROVとなった。
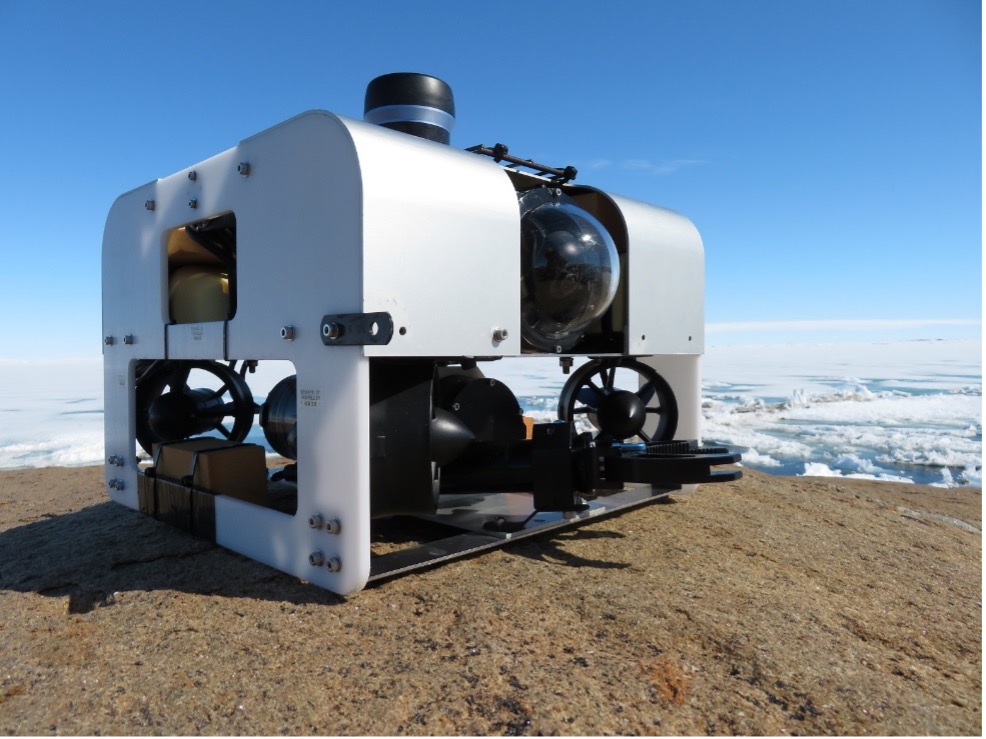
一方で、今回もROVやケーブルを背負って観測地点まで運搬するため、極力、軽く&小さくを念頭にフレームを設計した。その結果、長さ約50cm×約40cm×高さ約35cmで空中重量は約10kgとなり、中型のアウトドア用ボックスに収まるサイズとなった。操縦装置も前回同様、ペリカンケースにすべての機器を収めて煩雑な配線作業をオミットし、ROVと操縦装置を結ぶケーブルや電源線などを3本ほど挿せばすぐに使える仕様とした。
じつはこの「開けてすぐ使える」ということがフィールド機器にはもっとも重要で、面倒な配線やセットアップ、キャリブレーションに時間を費やしているうちに天候が変わったり、観測対象を見失ったりすることが多々ある。それに、寒いなかで準備や片付けに時間を要して、周囲から「まだ?」という目線を向けられるのがなによりつらいので、これまでの経験から「とにかくパッ! と使えるもの」を目指してきた。
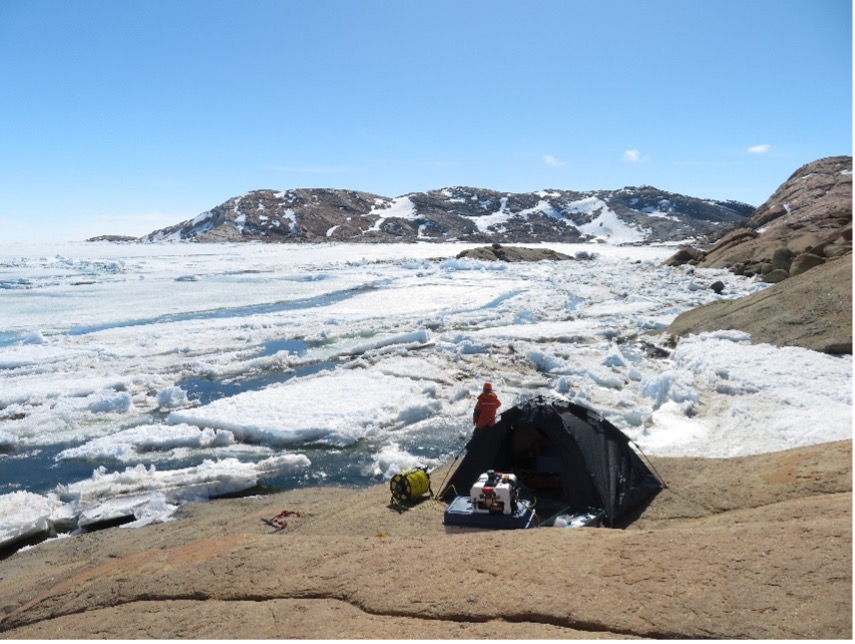
さらに今回は、操縦用のテントも用意した。前回、吹きっさらしの湖岸で寒さに全身が震え、冷たい岩に座りつづけて尻を冷やされ、痔になるのではと心配に震え、規格外の光量で照りつける太陽に操縦装置のモニターの輝度ではまったく歯が立たない事態に震え、とにかくさんざんな目に遭ったので、今回はこれらを回避するためにソロキャンプ用のテントを準備し、そのなかで操縦することにした。するとコレが超快適! だったのだが⋯⋯いざ、観測を始めると、思わぬ事態に見舞われた。
(つづく)

後藤慎平(ごとう・しんぺい)
1983年、大阪生まれ。筑波大学大学院博士後期課程修了。博士(工学)。第59次・第65次南極地域観測隊(夏隊)。民間企業、海洋研究開発機構を経て、東京海洋大学助教。専門は深海探査機の開発、運用。2014年から生物研究にまつわる海洋機器開発に取り組み、2018年には南極の湖底に生息するコケボウズを水中ロボットで撮影する、世界初のミッションを成し遂げた(第59次隊)。2023年11月〜2024年3月、第65次観測隊に参加。著書に『深海探査ロボット大解剖&ミニROV製作』(CQ出版)、『深海ロボット、南極へ行く』(小社刊)がある。